|
|
| 知的システムの研究室概要 |
広辞苑や国語辞典などを調べると、システムとは次の3つの意味を持ちます。
- 「入力・変換・出力の3要素から構成される単位」を意味する概念
- 「特定の仕事を行う単位」を意味する概念
- 個々の要素が有機的に組み合わされた「一定のまとまり」を持つ全体
工学の世界では、システムとは達成したい仕事や目的に応じた出力を与えられた入力を使って自動的に生成する一連の機構、枠組みを意味します。
システムを考える際、
「達成したい仕事は何か?」「システムを作ろうとする中心対象は何か?」
で、どのような入力が得られるか、またどのような出力を考えるか、が変わってきますが、本研究室では、ロボット自身が周囲の状況を判断し、作業を達成するために移動出来る自律移動ロボットを始めとして、
「人間のような柔軟さ・複雑さ等の知性」を持つ認識や判断・決定が行えるシステムの研究
を行っています。
|
昨今、機械がどんどん高度化して人間の生活の質を向上させている一方で機械が扱えない人はその恩恵を受けられないという問題が生じてきています。また、様々な機械の動きがかえって煩わしく感じることも出てきます。これは、機械が癖や嗜好といった個人の特性を考慮せず、万人向けの動作しか行っていないためだと考えられます。そこで、どんな人も煩わしさを感じることなく機械の恩恵を受けるためには、機械が人間のことを考慮しながら人間に適応することが必要となってくると考えます。
そこで、本研究室では人間の特性として人間の行動に着目し、機械が人間の行動を適切に認識ができるような行動のモデル化手法について研究をしています。モデル化手法を検討する上で、提案手法によってモデル化した人間の行動を、システム設計者が後で理解できるよう、可読性を損なわない人間のモデル化手法の構築を目指しています。
また、人間の行動のモデル化手法を検証する一つの方法として、提案した行動モデルを用いた人間の行動支援に関する研究も行っています。本研究では、右図のようにコース上に置かれたラジコンを人間が操作するという行動を提案手法によってモデル化しています。そして、行動支援として「次の行動(=ラジコンのボタン操作)を人間に提示する」ことを検討しています。適切なタイミングで支援をすることで、当該コースにおいてラジコン操作を行った経験がない人でも簡単にラジコンを走行させることができるようなシステムの実現を目指しています。
| 
|
自律移動ロボットとは、「自身で周囲の状況を認識し、与えられた作業と状況に見合った自身の動作を自分で決定することが出来る移動機構を持つロボット」です。
これまで多くの研究者が、様々な作業を実現するために、ロボットが搭載しているセンサの値からロボットの動作(以後、行動)を決定するシステムを研究してきました。その多くは、設計者が経験に基づいてロボットのセンサ値に対するロボットの行動をルールとして設計する手法か、またはシミュレーションなどを用いて想定し得るシチュエーションでロボットにトライ&エラーでセンサ値に対する行動ルールを学習する手法でした。ルールとしてロボットの行動を記述するのは非常に簡潔ではありますが、ルールの書き方によって性能が大きく左右されてしまいます。
その一方、最近のコンピュータの性能は目を見張るものがあり、昔では考えられないほどの複雑な計算を短時間で行えるようになりました。そのような環境を考えると、「ロボットが、今の状況に適した自身の行動をその場で見つけることが出来るのでは?」というアイデアから、自律移動ロボットが実時間探索、すなわちその場で自分の行動を探索によって決定する、というシステム構築の方法論についての研究を開始しました。
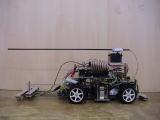
現在は、自律移動ロボットの情報収集すなわちセンシングに注目し、次に示す視覚情報処理に焦点をおいて研究をしています。右の写真は、検証用に用いている移動ロボットで、センサとして単眼カメラを搭載しています。全方位カメラを搭載したものもあります。 |  |
自律移動ロボットが作業を達成するための行動を今のセンサ値により自身で決定する場合、ルールが作成されている場合はルールを当てはめて行動を決めるだけです。しかし、上記の「自律移動ロボットの実時間探索」では、今の状況に適した自身の行動をロボットがその場で探索するのですが、そこでは(その場で探索する)=(考える時間が限られる)となります。
ここで、周囲の状況を知るためのロボットのセンサについて考えます。センサとは、力、温度、明るさといって物事の物理的、化学的、その他もろもろの現象を電気信号として取り出す装置です。知りたい情報別に様々なものがありますが、中でも有力なのは「視覚」すなわち「カメラ」です。カメラで撮影した画像に色々な処理をかければ、1枚の画像から色・大きさ、形といった何種類もの情報を同時に取得することが出来ます。
しかし、画像の処理には膨大な時間がかかります。計算機が進歩した現在でもまだこの問題は完全には解決されていません。そうすると、センサに視覚を用いたロボットでは、行動決定するための実時間探索を行うのが難しくなってしまいます。そこで、本研究では自律移動ロボットの実時間探索が実現できる効率的な視覚情報処理の方法論について研究を開始しました。
この研究は、現在のところ本研究室のメインテーマの1つであり、主に教員と大学院生が一緒に研究を行っています。右の図は、3つの位置を識別するためにロボットが選んだ画像の特徴です。少ない計算量でロボットは自分の位置を判断することが可能になっています。 |  |
ロボット技術の発展に伴って、一般社会で活躍するロボットの研究・開発が盛んにおこなわれるようになってきました。オフィスロボットやペットロボットなどのパートナーロボットを始めとして一般社会で活躍するロボットには様々なものがあり、介護ロボットもそのうちの1つです。
本研究室では、平成21年度から独立行政法人理化学研究所(以下、理研)との共同研究として介護ロボットに関する研究・開発を始めました。右側の写真は、理研で開発された介護ロボットRI-MANで、写真のように人を抱えることを目的としたロボットになります。本研究室では、RI-MANの腕の制御や腕に取り付けるセンサ回路に関する研究を行っています。 |
 |
本研究室では、平成21年度からつくばチャレンジへ参加するための屋外用自律移動ロボットの研究・開発を開始しました。
つくばチャレンジとは、「人とロボットが共存する社会を目指して」という言葉をキャッチフレーズに自ら考え行動するロボット(自律移動ロボット)が実際に人が生活する街の中で、速度を競うのではなく、「安全かつ確実に動くこと」を目指す技術チャレンジです。
右の写真は、本研究室で現在作成中のロボットのベース部分になります。つくばチャレンジは技術公開を原則としているため、本研究室での取り組みも順次公開していく予定です。詳しくは、つくばチャレンジのページを見てください。 |  |
物を回収する、配送する等、自律移動ロボットが与えられた作業を達成するためには、作業達成の邪魔になる障害物を回避する、という機能はどんな作業をするロボットにも必要不可欠な機能です。そこで、本研究室では、自律移動ロボットに障害物回避を実現させるための制御アルゴリズムを研究しています。
この研究は主に学部生の卒業研究として行っています。右の図は、平成17年度に構築した制御アルゴリズムでの障害物回避の様子です。シミュレータを用いています。今年度は実機実験を行う予定です。 |  |
ロボット研究者が、2050年にロボットとサッカーのワールドカップ優勝チームとの対戦を目指して立ち上げた「ロボカップ」があります。これは、研究者達が自身の研究分野の発展を目的とすると共に、次世代研究者を育成することを目的とした場所でもあります。
本研究室では、次世代研究者の育成を目的として行われている、主に中学・高校生が主体の「ロボカップJr.部門」の規定に沿ったサッカーロボットの製作と制御に関する研究を平成15年に立ち上げました。右の写真は、平成17年度卒研生が製作したサッカーロボットです。現在は、大学生やロボット研究者が参加をしているロボカップ小型機リーグ部門のサッカーロボットの開発を行っています。今年で2年目で、機体の製作を主に行っています。
この研究は主に学部生の卒業研究として行っています。 |  |
ランサーロボットとは、槍を装備した槍騎兵(ランサー)ロボットで、円周上のコースラインを周回し、コースラインの左右にある標的を突いて点数を競う競技(ロボットランサー競技)に出場することを目的として多くの点数を得られるためのロボットの機構、制御アルゴリズムを研究しています。右の写真は、平成14年度卒研生が製作したランサーロボットです。
この研究は主に学部生の卒業研究として行っていて、毎年ロボットグランプリの中のロボットランサー競技への出場を目指してランサーロボットを1から設計・製作しています。平成18年度頃から、予選を通過できるロボットが出てきました。
|
 |
|
|
