研究内容
装着型ロボット
両脚に麻痺のある患者さんが立って歩行するための歩行補助ロボットの研究を進めています.効率的で速く移動するための歩行パターンの最適化や,ユーザの意図に従って歩幅や歩行速度を調整するヒューマンマシンインタフェースの研究開発を進めています.また,新しい装着型ロボットIPPOの開発を進めています.
詳細はこちら

歩行器ロボット
高齢者や歩行に障害のある方が安心して歩行するための歩行器ロボットの開発を進めています.介助者が手で支えながら歩行を補助するような自律的な歩行補助の実現を目指しています.メカナムホイール機構によって全方向に移動でき,使用者の動きに即座に追随するシステムの研究開発をしています.
詳細はこちら

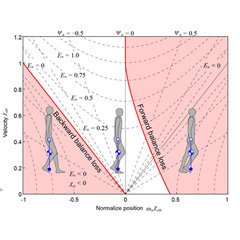
転倒リスク解析
転倒は,高齢者が寝たきりになる主要な要因の一つであることが指摘されています.転倒を防ぐための歩行訓練やアシストシステムを実現するには転倒のしやすさを定量的に評価することが重要です.本研究では,歩行の力学的特性に基づいて歩行の計測データからリアルタイムに転倒のしやすさを解析する手法の研究開発をしています.
詳細はこちら
バーチャルリアリティを利用した遠隔操作
ヘッドマウントディスプレイ(HMD)によるバーチャルリアリティ(VR)技術を援用したロボットの遠隔操作システムの開発をしています.HMDを装着すると自分の身体を目視できないため,ロボットを身体の動きで操作すると違和感を生じます.この違和感はロボットを自分の身体と同一であると感じる感覚(自己身体感覚)が低いことに起因します.この自己身体感覚を定量評価し,高い一体感を生じさせる技術の開発を進めています.
