装着型歩行補助ロボットの研究開発
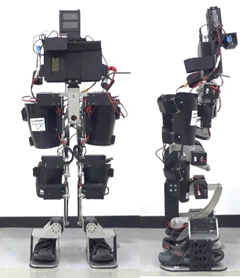
香川研究室では新しい装着型ロボットIPPO(Interlimb Parallel-link Powered Orthosis)の開発を進めています。
IPPOは脚の関節の動きをモータでアシストすることによって、脚の運動機能に障害のある方が立ち上がって歩行することを支援します。リハビリテーション訓練だけでなく、トイレへの移動・公園での散歩・ショッピングなど日常動作を支援する技術の確立を目標にしています。
IPPOの技術的な特長は以下の2点です。
- モータや支柱が左右の足の内側に配置するように機構を設計しています(内側系機構)。内側に配置することによってロボットを装着したまま車いすで移動することが可能です。
- モータによって骨盤の左右の移動をアシストすることができます。多くの歩行補助ロボットでは腕による体重支持が不可欠ですが、骨盤の横方向の移動をアシストすることによって杖に頼らずに歩けるデバイスを目指しています。

装着型ロボットによる日常生活支援の技術を確立するため,現在以下の研究課題に取り組んでいます.
- 生体力学に基づく歩行アシスト効果の定量評価
- アシスト歩行中の転倒予測と自律的なバランス制御の技術開発
- 動作(起立・歩行など)の意図に遅れなく応答するインタフェース技術の開発