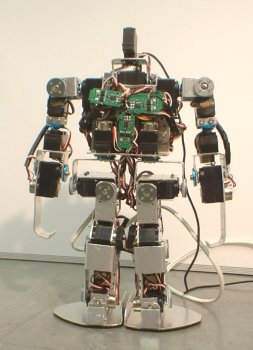
AIT鉄人2号 仕様
 |
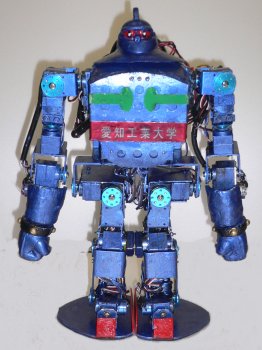 |
| ベース仕様 | ワールドレコーズ仕様 |
| ベース仕様 | ワールドレコーズ仕様 | |
| 身長 | 33cm(脚部長さ15cm) | 34cm(脚部長さ15cm) |
| 体重 | 1.7kg(バッテリー除く) | ← |
| 足裏 | 最長部10cm | ← |
| 関節自由度 | 全22自由度 脚部:6自由度×2=12 腕部:4自由度×2=8 頭部:2自由度 |
全20自由度 脚部:6自由度×2=12 腕部:4自由度×2=8 |
| 電源 | 6V外部電源 or 6V Ni-Cdバッテリー or 6V Ni-Mhバッテリー 6V アルカリ乾電池(電子回路用) |
6V Ni-Cdバッテリー or 6V Ni-Mhバッテリー 6V アルカリ乾電池(電子回路用) |
| 最大消費電力 | 50W | ← |
| 使用モーター | サーボモータ RS-2346ICS |
← |
| 制御ボード | 32ビットRISC CPU SH7145F FPGA Xilinx社 SpartanII XC2S100(自作) |
← |
| センサー | 3軸角速度ジャイロセンサー 加速度センサー |
← |
| 通信方式 | Bluetooth or シリアルケーブル |
Bluetooth |
| モーションクリエーター | Visual BASICによる自作 | ← |
| コントローラ | AIT正太郎のコントローラ1号機 音声認識 携帯電話操作 |
AIT正太郎のコントローラ1号機 音声認識 |
| その他 | PID制御 センサーによる自律動作 |