画像認識(顔検出)
これまでに我々は、「色情報を使用したラベリングによる画像認識」を鉄人に応用した。しかしながら、人とのコミュニケーションをロボットがとる場合、ロボットはその人に注視する必要がある。そこで、顔の検出機能を鉄人に取り入れた。
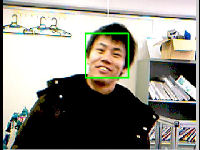
顔検出の手法は色々あるが、ここでは実時間処理が可能なスタンダードな手法である「Viola-Jones Fast Face Detection Method」を使用している。これは、矩形特徴(Haar-Like特徴)を利用した方法で、非常に簡単で高速でありながら、優れた識別能力を持つ。この手法を用いる場合、顔画像の学習データが必要だが、学習済み画像データも配布されているため、新たに多数の顔画像を集めてデータを用意する必要もない。
眼には安価なC-MOSカメラを持ちいた。このカメラは30fpsの速度を持つ一般的なもので、これを320×240の解像度で使用した。
この検出結果に基づき、目の中心が対象物体の中心に来るように制御を行った。
 |
 |
 |
| ロボットの目 | 人の顔が常に画面の中央に来ます (動画WMVファイル3.75MB) |
目が顔を追いかけます (動画WMVファイル1.77MB) |