画像認識(色認識)
ロボットの自律動作には「目」が不可欠ということで、カメラによる画像認識機能をつけました。まずは、単純な方式で色による物体の認識をベースに考えました。処理としては、以下のよう。
- カメラで撮影
- 色領域検出
あらかじめ記憶させた色に近い色の部分を取り出す
- ラベリング
連結された画素は1つの物体として、物体にラベル付けする
- 特徴抽出
ラベル付けされた物体ごとに、その大きさや形状などの特徴を抽出する
- 対象物体決定
各物体の特徴と、あらかじめ記憶させた対象物体の特徴を比較。どれが対象物体かを識別する
- 重心決定
対象物体の重心を決定
   |
| 対象物体の位置を特定 |
 |
 |
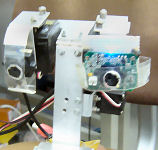
 |
| ロボットの目 | 目が物体を追いかけます (動画WMVファイル1.66MB) |
ボールが常に画面の中央に来ます (動画WMVファイル600kB) |