2足歩行ロボット組み立てレポート
KHR-1(ECO-ROBOT) 第2回
第1日目(3時間)
1.サーボケースビスの取り外し
まずは内容物を確認の後、最初の作業「サーボのネジ外し」。合計16個のサーボのネジを外すという単純作業からのスタートです。黙々とネジを外します。
 |
 |
| ねじを外す、外す、外す、・・・・合計64本 | |
2.サーボをブラケットに取り付ける
次に、サーボモータをブラケットに取り付け。ここで、まずは最初の質問が。「サーボがブラケットに入りません。」。これに対するアンサーは「力ずくで入れるんです^_^」。初心者の場合、力を入れてブラケットが壊れないか心配であまり力を入れられないようです。
あとは、ブラケットの向きを間違えるケースも。
 |
 |
|---|---|
| ブラケットにサーボが入らない・・・ | 力ずくで無事入りました |
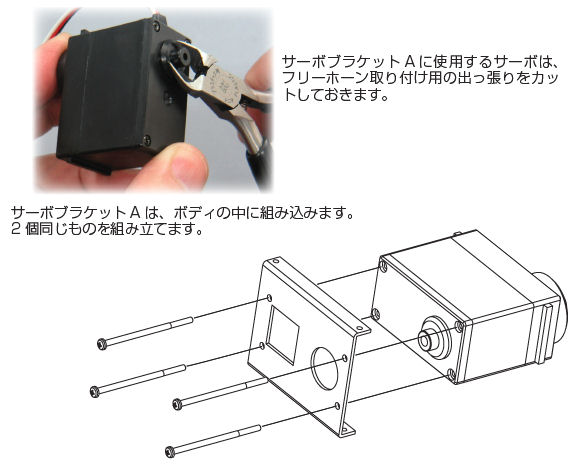
無事ブラケットの取り付けが進む中、またまた質問が。「マニュアルでは”フリーホーン取り付けようの出っ張りを切る”と書いてありますが、図ではついたままです。本当に切ってもいいんですか?」。アンサー「良いんです。」これはマニュアルの図の間違いですね。「もし万が一切ってはいけないものだったらどうしよう」という不安を誰でも感じますから、これは早急にマニュアルの訂正が望まれます。
しかし、いざ切ろうとすると、また問題が。「切れません」。マニュアルではニッパで切っているように見えるのですが、手持ちのものでは力を入れても切れません。そこでカッターナイフで切ろうとしましたがやはり切れない。最終的には小さなニッパで少しずつ砕いていって、やっと切れました。以外に硬い材質です。このロス時間30分。
 |
 |
 |
 |
|---|---|---|---|
| 間違ったマニュアルの図 (クリックすると大きくなります) |
ニッパでは切れません | 少しずつ砕く | やっとできました |
 |
 |
 |
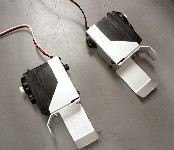
| その他の部品も徐々に完成 | ||
ネジ外しは退屈でしたが、だんだん形ができてきてちょっと楽しくなってきたようです。
今日はここまでで時間切れ。
(KHR-1のブラケットは軽いのに剛性が高くなるように設計されており、我々も勉強になります。)
・・・つづく
協力:イクシスリサーチ株式会社