2足歩行ロボット組み立てレポート
KHR-1(ECO-ROBOT) 第3回
第2日目(3時間)
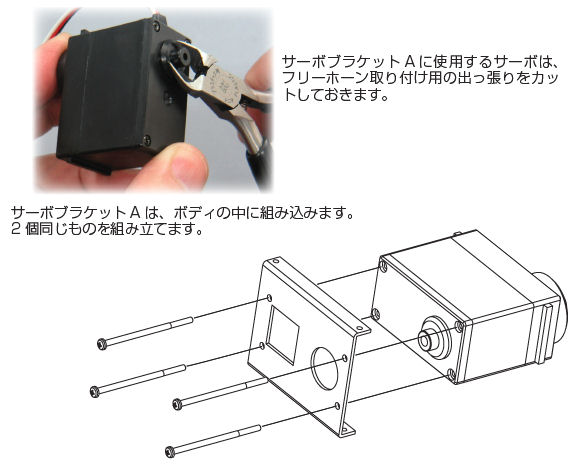
3.基板の設定、サーボ位置だし
KHR−1では制御ボードRCB−1を2台使う。それぞれ12個合計で24個のサーボをコントロールできる、
まずは、2台を接続。そして、サーボの取り付け時の回転位置を決める。ところが、サーボをつないでもうんともすんとも動かない。良く見ると、サーボのコネクターのピンが押されて外れてしまっている。かなり固めのコネクタのため、強く差し込んだときに外れてしまうようです。そこで、後ろから押してピンを押し込んでみました。でもやっぱり動かない・・・・と思ったらゆっくり動き出しました。安全のため、すぐには動き出さないようになっているようです。
 |
 |
| RCB−1 2台をつなぐ |
左:正常なコネクタ
右:ピンが飛び出たコネクタ |
4.パーツをつなげる
次は、それぞれのパーツを結合していく作業です。前の作業で位置決めした回転位置が狂わないように注意して、パーツを接続していきます。この辺は特に問題なく進んでいきました。形が出来上がっていく、一番楽しいところです。今日はここまで。
第3日目、4日目(6時間)
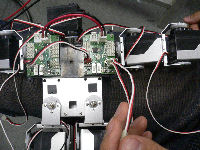
5.コードの配線、火入れ
次は、RCB−1にサーボを接続していく作業です。
コードは絡まらないように、ストラップでまとめて固定していきますが、やっぱりその前にひとまず火入れをしてみました。初期状態では手を広げた形になればOK。あとは、初期位置を設定してめでたく完成。
 |
 |
 |
| サーボの配線をRCB−1に接続 |
ひとまず火入れをしてみる |
配線をまとめる。 |
 |
| 完成 |
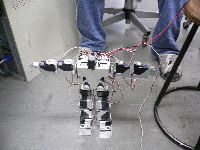
6.動かしてみる
まずは、サンプルモーションを動かしてみます。歩行はそのままではうまく動きませんでした。どうも左に倒れます。再度初期位置を調整したところ、何とか歩けるようになりました。なかなか速いですKHR-1。今度はオリジナルのモーション作成してみました。付属のソフト「HeartToHeart」は使い方が簡単で、モーション作成は楽にできます。
調子に乗って色々モーションを作っていたら、腕のサーボが動かなくなったようです。サーボを分解してみると、ギアが欠けていました。樹脂ギアのため、あまり力はかけれないようです。あわてて保守用ギアを注文。その後も、サーボの基板が逝ったり良く壊れます。保守用パーツのストックがかなり必要なようです。
 |
| ギアの歯が欠けた |
7.まとめ
KHR-1は非常に軽快な動きをします。これは構造的な剛性の高さや稼動範囲の広さにあるかと思います。このことにより、初心者でも簡単に色んなモーションが作れます。また、色んなオプションパーツも出ているので、ホビーロボットとしてはそういったものを付け加えていく楽しみはありそうです。
協力:イクシスリサーチ株式会社 |