2足歩行ロボット組み立てレポート
Bioloid
第1日目(4時間)
組み立てる
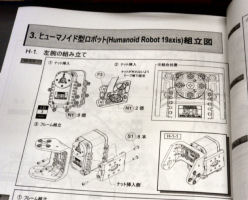
マニュアルには、組み立て手順が詳細に書いてある。各パーツには番号が振ってあり、その通りに組み立てるだけ。まさしくプラモデルを組み立てるようだ。ただ、ナットを大量につけてねじ締めがあるので大変。サーボホーンには印がついているため、サーボの初期位置出しは不要。マークにあわせて各パーツをつけていくだけだ。サーボには番号が振ってあるので、それに注意。(最初どのサーボでも良いと思っていきなり適当にサーボにパーツを付けそうになった。)組み立てはいたって簡単。これなら小学生でも作れそう。ところが、途中でねじが入らないサーボホーンが。サーボホーンは最初からサーボに取り付けられている。良く見ると、サーボホーンにはじめから取り付けられているナットがずれていた。軽くはめられているだけなため、外れたようだ。これを直すと、ちゃんとねじが入った。今度は、腰のパーツの絵と番号が違う。マニュアルの記載ミスのよう。
 |
 |
 |
|---|---|---|
| 詳細な組み立て手順が書いてある | 手順に従って組み立てていく | ナットがサーボホーンから 外れていた。 |
 |
|---|
| 今日はここまで |
第2日目(4時間)
今日も組み立ての続きから。いよいよ上半身と下半身を合体させて、頭を装着。つづいて配線。色んな長さのケーブルが入っているが、マニュアルにはケーブルの長さが指定された図が載っている。その通りに配線したつもりが、途中で指定の長さのケーブルが足りなくなった。どうもどこかで間違えたよう。間違えた場所を探すのも面倒くさいので、適当なケーブルで代用。結構余裕を持たせた配線になっているので、多少違ってもよさそう。
と、配線をしていると、ん?右と左の足のサーボのIDが逆だぞ。間違えて組み立てたようだ。足を外して入れ替える。あれ?ひざのパーツが左右で違うぞ?表裏があったのね!と、またまた修正。やっと何とか完成。
 |
|---|
| 電源入れなくても立ちます |
最後にバッテリーの入ったコントローラを背中に付けよう・・・としたら、ネジが入る穴が深すぎて、手持ちのドライバーで届かない。長いドライバーは穴に入らないし、細いドライバー(長さ4cm)では届かない。ということで、急遽細長いドライバーを探す。
ということで、無事取り付け完了・・・・とおもいきや、今度はネジが空回りして締まらない。良く見ると、あるべきところにナットが入っていない。そりゃ締まらないはずだ。また付け間違いかとマニュアルを見ると合っている。これもマニュアルの記載ミスのよう。
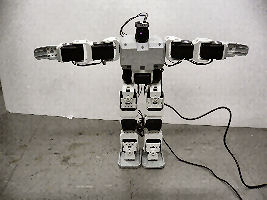
ということで、今度こそ完成。電源を入れ、組み立て確認用の制御プログラムをダウンロードしてみる。手を広げた状態になればOK。
 |
・・・つづく