俀懌曕峴儘儃僢僩慻傒棫偰儗億乕僩
俛倝倧倢倧倝倓
丂戞俁擔栚丄係擔栚乮俉帪娫乯
儌乕僔儑儞嶌惉
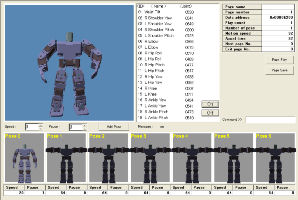
丂傑偢偼丄僒儞僾儖傪摦偐偟偰傒傞丅俛倝倧倢倧倝倓偱偼乽Motion Editor乿偱儌乕僔儑儞傪嶌傝丄乽俛倕倛倎倴倝倧倰 Control Programmer乿偱僙儞僒乕怣崋傗巜椷偵懳偡傞峴摦傪巜掕偡傞丅僒儞僾儖偼丄慜偵暔懱偑偁傞偲愒奜慄僙儞僒乕偑専抦偟偨傜乽垾嶢乿偺儌乕僔儑儞傪丄壒傪姶抦偟偨傜壒偺悢偩偗乽攺庤乿偺儌乕僔儑儞傪峴偆丅乽俛倕倛倎倴倝倧倰 Control Programmer乿偼俛俙俽俬俠偺傛偆側暥朄傪俧倀俬偱峔抸偟偰偄偔曽幃偱丄捈姶揑偱傢偐傝傗偡偄丂師偵丄乽Motion Editor乿偱儌乕僔儑儞傪嶌惉丅怓傫側儌乕僔儑儞傪嶌偭偰傒傞丅Bioloid偼億乕僘傪偲傜偣偰儌乕僔儑儞傪嶌惉偡傞乭嫵帵婡擻乭傪僒億乕僩偡傞丅悢抣偱娭愡埵抲傪愝掕偡傞偙偲傕偱偒傞偑丄弶婜埵抲偱偺悢抣偑侽偱側偔丄愨懳妏搙偵側偭偰偄傞偨傔傢偐傝偵偔偄丅偦偙偱丄嫵帵婡擻傪儊僀儞偵巊偆偙偲偵偟偨丅愝掕偼奺億乕僘傪寛傔丄億乕僘娫偺堏摦帪娫丄懸偪帪娫側偳傪寛傔傞丅億乕僘娫偼戜宍曗姰偝傟傞丅
丂崱搙偼曕偐偣偰傒傞丅偟偐偟丄Bioloid偼廳偔偰廳怱偑崅偄忋偵崉惈偑偪傚偭偲掅偄丅偦偺偨傔丄側偐側偐曕偐偣傞偙偲偑偱偒側偄丅偦偆偙偆偟偰偄傞偆偪偵丄僶僢僥儕乕偑廩揹偱偒側偔側偭偨丅偳偆傕僸儏乕僘偑愗傟偨傛偆偩丅側傫偲Bioloid偵偼僶僢僥儕乕偲偺娫偵僸儏乕僘偑擖偭偰偄傞丅乮儌乕僞乕偑5屄埲忋儘僢僋偡傞偲埨慡偺偨傔僸儏乕僘偑愗傟傞偲偺偙偲丅乯梊旛偑1屄擖偭偰偄傞偺偱庢傝懼偊傞偑丄傑偨愗傟偰偟傑偭偨丅傕偆梊旛偼柍偄偺偱丄俙俠傾僟僾僞偱摦偐偡偙偲偵乮俙俠傾僟僾僞乕偲偺娫偵偼僸儏乕僘偼擖偭偰偄側偄乯丅
丂偟偐偟丄崱搙偼昿斏偵儕僙僢僩偑偐偐傞傛偆偵側偭偨丅偳偆傕攚拞傪嫮懪偟偡偓偰丄俙俠傾僟僾僞偺愙怗偑埆偔側偭偨傛偆丅Bioloid偺俙俠傾僟僾僞偺嵎崬岥偼攚拞偵偁傝丄搢傟傞偲傑偲傕偵僾儔僌傪懪偪晅偗傞丅巇曽偑柍偄偺偱丄拞偐傜捈愙慄傪堷偭挘偭偰丄僒僀僪偐傜揹尮偑嫙媼偱偒傞傛偆偵夵椙丅
丂埆愴嬯摤偡傞偙偲俀帪娫丅壗偲偐曕偐偣傞偙偲偑偱偒偨丅
 |
 |
 |
|---|---|---|
| 僒儞僾儖儌乕僔儑儞傪摦偐偟偰傒傞 倂俵倁僼傽僀儖乮1.8MB乯 |
摦嶌偼IF暥側偳俛俙俽俬俠偺傛偆側 暥朄偱僌儔僼傿僇儖偵愝掕 |
Motion Editor傕僌儔僼傿僇儖偱傢偐傝傗偡偄 |
 |
 |
 |
|---|---|---|
| 僸儏乕僘偑擖偭偰偄傞 | 俙俠僾儔僌偼攚拞偵憓偡 | 僒僀僪偐傜揹尮偑嫙媼偱偒傞傛偆偵夵椙 |
 |
|---|
| 曕偐偣傞 倂俵倁僼傽僀儖(630KB) |