2足歩行ロボット組み立てレポート
Bioloid
今回は、ベストテクノロジー株式会社の2足歩行ロボットキットBioloidの組み立てレポートです。
講座概略・準備
目的:学生にものづくりに興味を持ってもらう対象学生:愛知工業大学電気系学生。
グループ構成:3人/1セット
講義担当:教員1名
使用機材:
- 2足歩行ロボット組み立てキット ベストテクノロジー社 Bioloid (9万5千万円)
- パソコン(WindowsXP、RS-232C出力付)
- テスター
- ドライバー、ラジオペンチ、ニッパ
- カッター
初期ロットとあって、箱は飾り気の無いシンプルな箱。その中にパーツがぎっしりと入っていた。Bioloisは2足歩行専用の組み立てキットというわけではなく、その他の形も色々できる。まるでレゴのようだ。2足歩行ロボットの形で作ってもパーツがたくさん余るほどいっぱいなパーツが詰まっている。
 |
 |
 |
|---|---|---|
| 箱 | 中身は大量のパーツ | サーボはAX-12 IDが振ってある |
| サイズ | 370mm |
| 重さ | 2.2kg |
| 電源電圧 | 外部電源12V5A バッテリー Ni-MH 9.6V |
| 関節 | 総19関節・腰:1、片腕3×2、片脚6×2 |
| サーボモーター | AX-12 動作角300度 トルク16.5kg・cm スピード0.196sec/60° 55g 双方向TTL |
| センサー | AX−S1(赤外線センサー、音センサーモジュール) |
| その他の特徴 | 教示機能 |
今回製作することになったのは、もちろんヒューマノイド型
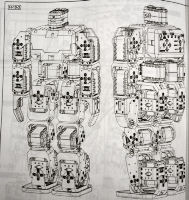 |
 |
|---|---|
| ヒューマノイド型を組み立てる | アーム型の例も載っている |
・・・つづく