歩行ロボットの研究
生物の動きを参考に、歩行を行うロボットの研究を行っています。人間のような2足歩行や、犬のような4足歩行について研究。
特に、つま先を使用する歩行に着目。人や動物はつま先を有効に活用してスムーズで効率的な歩行を行うだけでなく、立ち上がり動作やジャンプなど様々な動作においてつま先は非常に重要な役割を果たしています。


つま先を使用した4足歩行 つま先を使用した2足歩行
水中生物ロボットの研究
自然界の生物を模倣して(生体模倣 バイオミメティクス)、水中生物型ロボットを研究しています。
通常のスクリューを用いた推進に対し、振動翼(ひれ)を使用する推進方法は、人との協調作業における安全性、海草などの巻き込みなどの点で大きなメリットがあります。また、水中生物の観測においても、自然界に溶け込み生物や環境に影響が少ないという点も優れています。また、水中の生物は非常に運動性能が高く、小回りができたり効率よい推進力を発生しています。
本研究室では、イルカ型、亀形、マンタ型、ウツボ型など様々なタイプの水中生物のロボットを開発、水中での3次元での自由な遊泳を実現しています。

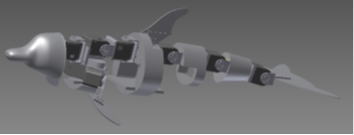
ウミガメ型ロボット イルカ型ロボット
アバターロボットの研究
人の分身ロボットーアバターロボットを開発しています。マスタースレーブにより人の動きをそのままロボットにさせるだけでなく、VRなどを用いた視覚情報、圧力センサによるロボットの触覚情報、マイクによる音声情報など様々な感覚をロボットから人へとフィードバックし、あたかもロボットのいる場所に人がいるような感覚を感じます。
このようなロボットが実現すると、人型ロボットを直感的に操作して人のいけないようなところで作業を行ったり、遠隔地から会議に参加したり、飛行機に乗れないような人が海外旅行に出かけたり、ロボットを複数の場所に置いておけば移動を伴わずに行ける(分身の術)が使えるなど大きなメリットがあります。

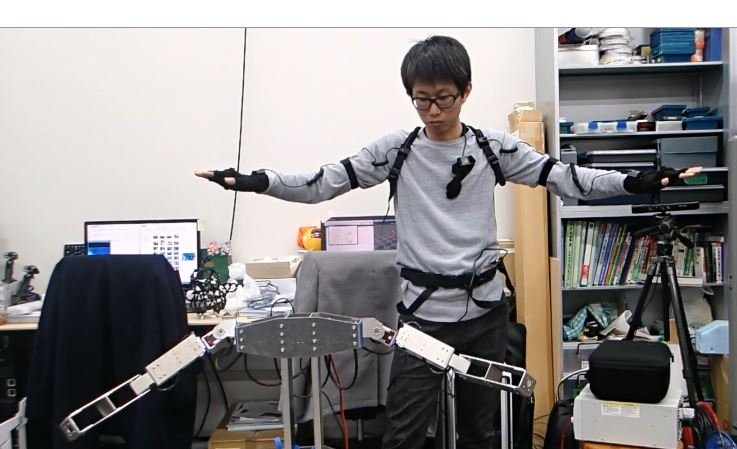
VRヘッドセットを用いた視覚情報の共有 腕のマスタースレーブ制御
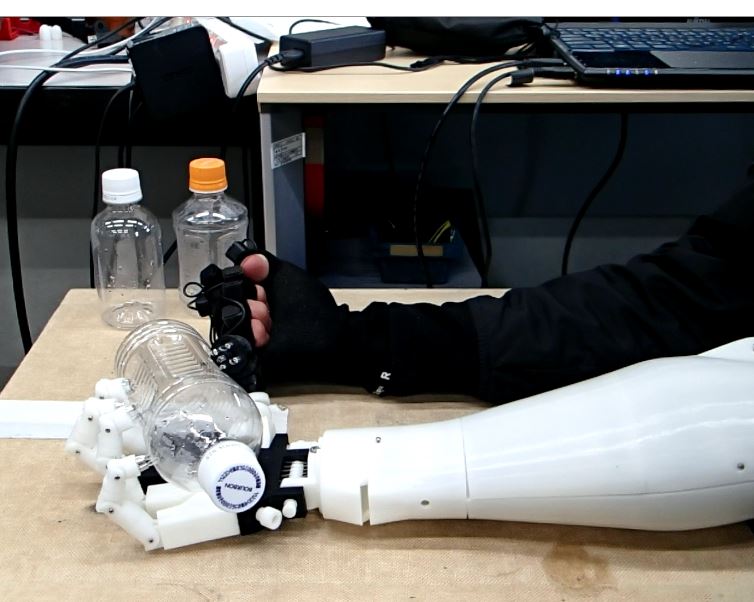
ロボットハンドのマスタースレーブ制御
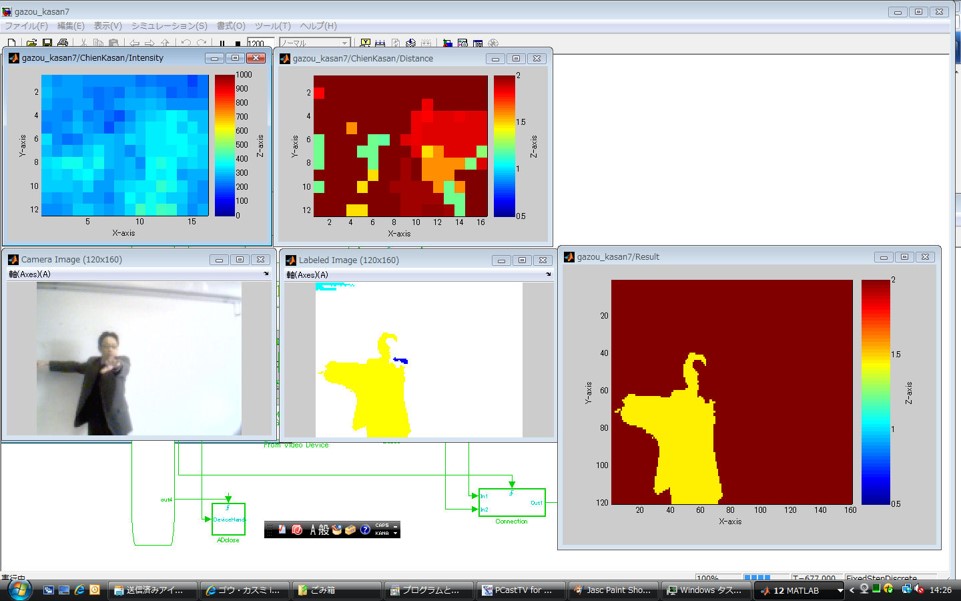
サイネージュロボットの研究
博物館や美術館で来館者の案内を行うロボットを研究しています。指差し動作で展示物の説明を求められたとき、視覚モーションセンサーでその方向を確認、人と同じように首を振りながら音声認識と物体認識も活用して対象物を認識。その対象物に適した説明を行います。また、指向性スピーカーにより特定の人だけに説明が聞こえるようにしたり、一度に複数の人に異なる内容や言語で説明します。ロボットによるプロジェクター投影でスクリーンとロボットの位置よりひずみ補正や大きさの補正を行います。
超音波深度センサーの研究
超音波により、周りの深度(3次元情報)を得ます。カメラによる光学的な震度センサーに比べ、霧や煙、雪などの光を遮蔽するものがある環境でも使用できるというメリットがあります。超音波走査による方法ではなく、遅延加算を用いた計算により一度に深度を得る手法で、高速計測ができます、また、スペクトル拡散や大出力超音波送信アレーにより数十mの距離までの計測ができます。
パラメトリックスピーカーの研究
超音波の指向性の高さと非線形音響現象を用いた、優れた指向性を持つ可聴音を発生するスピーカーです。数度の狭い範囲だけに音を伝えることができるため、ミュージアムなどでの展示物の説明、駅のホームなどでのアナウンス、車のクラクションとしての使用(周りの家への騒音対策)などが考えられます。現在は、音の方向の制御や指向性の広がりの制御などの研究を行い、より使いやすいものとするような研究を行っています。
Designed by CSS.Design Sample