AIT揝恖1崋偺奐敪娐嫬丄巊梡偝傟偰偄傞媄弍
丂
丂儘儃僢僩偵偼怓乆側媄弍偑巊傢傟偰偍傝丄暆峀偄抦幆偑昁梫偵側傝傑偡丅崱夞偺揝恖偺奐敪偵巊傢傟偰偄傞媄弍偼丄慡偰垽抦岺嬈戝妛偺妛晹偱妛傇偙偲偑偱偒傞傕偺偱偡丅戝妛撪偱偼懠妛壢偺島媊傪庴偗傞偙偲傕偱偒丄昁梫偵墳偠偰帺暘偺強懏偡傞妛壢偵柍偄壢栚傕曌嫮偱偒傑偡丅
![]()
丂峔憿偼3師尦CAD偺Autodesk Inventor傪巊梡丅CAD偱奺僷乕僣傪愝寁屻丄CAD忋偱慻傒棫偰丅偦偺愝寁恾偵婎偯偄偰僷乕僣偺壛岺傪峴偄丄幚婡偺慻傒棫偰傪峴偭偨丅垽抦岺嬈戝妛偱偼婡夿宯妛壢側偳偱CAD偺島媊偑峴傢傟偰偄傞丅
 |
 |
| 侾丏丂僷乕僣愝寁 | 俀丏丂CAD忋偱僷乕僣慻傒棫偰 |
 |
 |
| 俁丏丂壛岺恾弌椡 | 揥奐恾傕娙扨偵偱偒傞 |
![]()
丂垽抦岺嬈戝妛偵偼丄傒傜偄岺朳偲偄偆愝旛偑偁傝丄偝傑偞傑側岺嶌婡夿偑抲偄偰偁傞丅娙扨側島廗傪庴偗傟偽丄垽抦岺嬈戝妛偺妛惗偱偁傟偽扤偱傕巊偆偙偲偑偱偒傞丅岺朳偵偼婡夿岺嶌偵弉楙偟偨媄弍堳偺曽乆傕忢挀偝傟偰偍傝丄怓乆傾僪僶僀僗偟偰傕傜偊傞丅抲偄偰偁傞嵽椏偼帺桼偵巊偊傞偟丄柍偄嵽椏傕岺朳偺梊嶼偱峸擖偟偰傕傜偊傞丄戝曄偆傟偟偄愝旛偩丅AIT揝恖1崋偱巊梡偟偨偺偼埲壓偺婡夿丅懠偵傕慁斦側偳偨偔偝傫偺婡夿偑偁傞丅
 |
 |
| 僔儍乕儕儞僌儅僔乕儞丗嬥懏傪傑偭偡偖愗抐偡傞僇僢僞乕 | 僐儞僞乕儅僔儞丗嬥懏傪愗抐偡傞僲僐僊儕 |
 |
 |
| 棫儃乕儖斦丗寠傪奐偗傞僪儕儖 | 嬥懏傪嬋偘傞婡夿丗捈妏偵嬋偘傞偺偵曋棙 |
 |
 |
| 儀儖僩幃僌儔僀儞僟乕丠丗嵽椏傪嶍傞揹摦僒儞僪儁乕僷 | 僴僀僩僎乕僕丗働僈僉慄偼偙傟偱堦敪 |
![]()
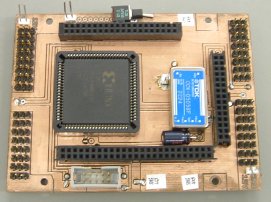
丂PC偐傜摦嶌巜椷傪揝恖杮懱偺SH7045F偵憲怣丅SH7045F偼巜椷偵婎偯偄偰丄僒乕儃儌乕僞梡偺PWM怣崋傪嶌傞丅偨偩偟丄SH7045F偼16杮偺PWM怣崋偟偐弌偣側偄偨傔丄僞僀儉僔僃傾儕儞僌偱16杮偺弌椡僺儞傛傝32偺PWM怣崋傪弌偟丄偦傟傪CPLD(Complex
Programmable Logic Device)偱32杮偵暘偗偰偄傞丅CPLD偼VHDL偱僾儘僌儔儈儞僌傪峴偭偨丅VHDL傗怣崋張棟丄儌乕僞惂屼偺島媊偼垽抦岺嬈戝妛偱偼揹婥宯妛壢側偳偱峴傢傟偰偄傞丅
丂1崋偱偼丄僙儞僒椶偼傑偩庢傝晅偗偰偍傜偢丄僼傿乕僪僶僢僋惂屼偼峴偭偰偄側偄丅
 |
||
丂
|
![]()
| 丂杮懱偵巊偭偰偄傞SH7045F偼C尵岅偱偺僾儘僌儔儈儞僌丅嶨帍傗彂愋傪嶲峫偵偟側偑傜撈帺偺僾儘僌儔儉傪惢嶌丅PC偐傜偺奺儌乕僞偺妏搙媦傃僗僺乕僪偵娭偡傞巜椷傪丄PWM怣崋偵捈偟偰弌椡偡傞乮揝恖杮懱偵僨乕僞傪婰壇偟偰丄帺棩摦嶌傕壜擻乯丅僾儘僌儔儉偼PC忋偱僐儞僷僀儖偟丄SH7045F偵彂偒崬傫偩丅C尵岅偼丄垽抦岺嬈戝妛偺懡偔偺妛壢偱島媊偑峴傢傟偰偄傞丅 丂摦嶌巜椷傪憲傞PC偺傾僾儕働乕僔儑儞傕撈帺偵奐敪偟偨丅VisualBasic6.0偱惢嶌丅杮懱偵奺儌乕僞偺妏搙丄僗僺乕僪偺巜椷側偳傪憲偭偰偄傞丅傑偨丄媡偵杮懱懁偐傜尰嵼偺儌乕僞偺妏搙側偳傪庢摼偡傞偙偲傕偱偒傞丅 |
|
||
|
![]()
|
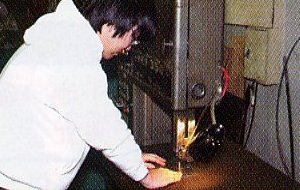
丂崱夞偼CPU杮懱偺儃乕僪偼巗斕偺傕偺傪巊梡偟偨丅偦傟偵愙懕偡傞CPLD媦傃揹尮夞楬偼夞楬愝寁偲偟偰偼斾妑揑娙扨側暔偲側偭偨丅偨偩丄攝慄偑戝曄側偨傔丄埲壓偺傛偆側僾儕儞僩婎斅帺摦壛岺婡偱僾儕儞僩婎斅傪惢嶌偟偨丅偙偺壛岺婡傕傒傜偄岺朳偵偁傞丅攝慄恾偼僼儕乕僜僼僩偺PCBE傪巊偄丄偦傟傪僈乕僶乕僨乕僞偲偄偆僾儕儞僩婎斅偺昗弨僨乕僞宍幃偺僼傽僀儖偵棊偲偡丅偦傟傪丄帺摦壛岺婡偱撉傒崬傒丄壛岺僨乕僞偵曄姺偟偨偺偪丄帺摦壛岺婡偱婎斅傪嶍偭偨丅
|
|

丂偁偲丄揹尮偼僶僢僥儕乕偱傕摦偔偑丄偡偖曻揹偟偰偟傑偆偨傔奐敪傗僨儌偺帪偵偼奜晹揹尮偱摦偐偡偙偲偵側傞丅揝恖偱偼侾侽A嬤偄揹棳傪昁梫偲偡傞偑丄庤帩偪偺拞偵偼偦傟偩偗偺揹棳傪庢傟傞傕偺偑柍偐偭偨丅偐偲偄偭偰丄怴偨偵10A偺揹尮傪峸擖偡傞梊嶼傕柍偄丅岾偄5A偺揹尮1戜偲2.5A偺揹尮3戜偑尒偮偐偭偨丅偦偙偱丄偙傟傜傪暲楍偵愙懕偡傞偙偲偵傛傝丄揹尮傪妋曐偟偨丅偨偩丄埨掕壔揹尮偱偼揹抮偺傛偆偵扨弮偵暲楍愙懕偼偱偒側偄丅偦偙偱丄暲楍愙懕偺偨傔偺揹尮嫙媼夞楬傪惢嶌偟偨丅夞楬偺愝寁偵偼丄SPICE(CircuitMaker)傪巊梡丅僔儈儏儗乕僔儑儞傪峴偄丄偦傟偵婎偯偄偰夞楬傪嶌偭偨丅傾僫儘僌夞楬傗SPICE傪巊偭偨夞楬愝寁側偳偺島媊傕垽抦岺嬈戝妛偱偼峴傢傟偰偄傞丅
 |
 |
| SPICE偵傛傞僔儈儏儗乕僔儑儞 | 揹尮嫙媼婍 |