ヨー軸両持ち構造
ロボットで良く問題になるのが、ヨー軸の片持ち構造。片持ちは構造的にガタが出やすく、歩行の安定性に大きな影響を与える。通常は面で支えることにより安定化させるが、それでもガタが出てしまう。また、大型になるとヨー軸への負担は半端でなく、最悪軸がポッキリといってしまう。そこで、鉄人5号では、ヨー軸をサーボモーターの軸両端で支える両持ち構造とした。
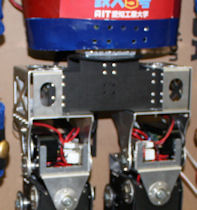 |
| ヨー軸両持ち構造 |
両持ち構造の欠点としては、足の開き各が狭くなる点がある。しかし、今回作成した両持ち構造では開き角は70度以上確保されており、動作にそれほど悪影響は与えていない。
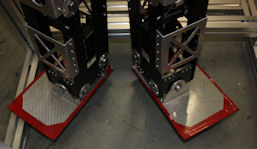 |
| 最大開き角 |
