マスタースレーブ装置
イベントデモ用に急遽マスタースレーブ装置を作ってみました。最初作った1号機は動作はするものの、少し腕の動きが阻害されるので改良を加えた2号機について紹介します。
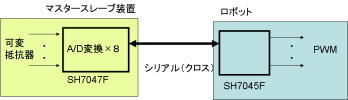
本マスタースレーブ装置の構成は、右のようです。マスター側では、可変抵抗で関節角度を電圧に変え、SH7047Fボード(買ってあったものの、鉄人本体での採用は結局やめたので余っていた)でA/D変換した後、ホームポジション分を減算、角度データへの変換係数をかけてシリアルでロボット側に送っています。シリアルケーブルはクロスでの接続になります。制御している関節は4×2=8自由度です(回路的には最大16自由度まで対応可能です)。
 |
 |
 |
| 可変抵抗で角度を電圧に変換 | SH7047FでA/D変換 | シリアルケーブルをクロスの 変換コネクタで接続 |
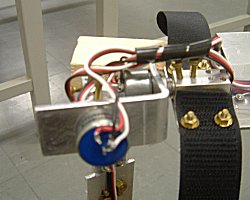
一番苦労したのは、如何に腕の動きを阻害しないようにするか。そのため、腕のところにスライド機構を入れました。縦フライス盤で溝を作成。旋盤で直径6mm厚さ1.5mmのスライド用リングを作って非常に滑らかなうスライドが実現できました。また、背中の反りを吸収するために、背中の部分は柔らかい素材を使い、同じくスライド機構を入れました。
肩の水平度を保つために肩への固定も一工夫。最終的にはマジックテープで体に固定することによりまずまずの物ができました。
 |
 |
 |
| 腕のスライド | 背中のスライド | 肩への固定はしっかりと |
で、出来たのがこんな感じ。
 |
 |