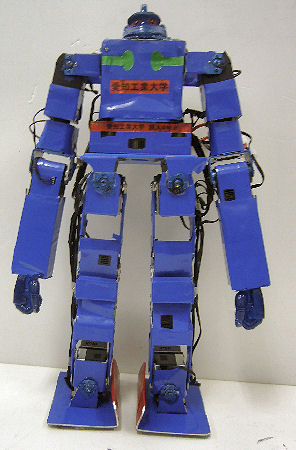
AIT鉄人4号Jr. 仕様
 |
| 2008年7月現在 |
各種イベントにおいてデモや来場者の操縦体験に使用したり、実験的な試みを行うときに使用。
初心者の新入スタッフ導入教育にも使用できるよう、制御ボードは市販のものを使用。
タイプπは操縦者の命令で動きながら、自らも周りの状況を把握して動くことができるハイブリッドタイプの知能ロボット。周辺(Peripheral)の状況に応じて動作できるという意味で、頭文字Pのギリシャ文字πを取った。今後も、鉄人は高知能化していく予定。
| ベース仕様(2008年7月現在) | タイプπ(2008年12月現在) | |
| 身長 | 45cm(脚部長さ27cm) | ← |
| 体重 | 2.8kg | ← |
| 足裏 | 12.5cm×7.5cm | ← |
| 関節自由度 | 全21自由度 脚部:7自由度×2=14 (膝はそれぞれモータ2個使用) 腕部:4自由度×2=8 腰:1自由度 |
← |
| 電源 | 11.1V LiPoバッテリー 1200mAh 40Cmax | ← |
| 最長連続駆動時間 | 20分 | ← |
| 使用モーター | サーボモータ 脚部:KRS-4014HV 6個、KRS-4013HV 8個 腕部:KRS-4014HV 8個 腰:KRS-4014HV 1個 |
← |
| 制御ボード | 近藤科学 RCB-3HV | 近藤科学 RCB-3HV KCB-1(SDK改造) |
| センサー | 2軸加速度センサRAS-2 1個 ジャイロセンサKRG-3 2個 |
2軸加速度センサRAS-2 1個 ジャイロセンサKRG-3 2個 赤外PSDセンサ 4個 超音波センサ 2個 |